Robot Manipulation and Dexterity
This page shows ARMLab advances in robotic dexterity both in mechanical design of robotic fingertips and applications enabled by embodied intelligence.
Research Topics
Applications of Robotic Dexterity
Description:
This research pushes the limits of robotic dexterity and embodied intelligence. We often leverage our advances in tactile sensing with DenseTact to enable robotic manipulators to perform complex, dexterous tasks.
Papers and Videos:
Scene Modeling: Visual Tactile Gaussian Splatting

Description:
This research focuses on developing algorithms that integrate tactile data into Gaussian Splatting, a real-time explicit and photorealistic 3D representation. These representations can be used to enable a robot to perform advanced manipulation tasks through semantic embedding and physical interaction prediction.
Papers and Videos:
DenseTact Development
Description:
We believe robotic dexterity is the catalyst challenge to having ubiqitous robots that may assist in caring for the elderly, manufacturing, agriculture and every task that requires tactile sensing and dexterity.
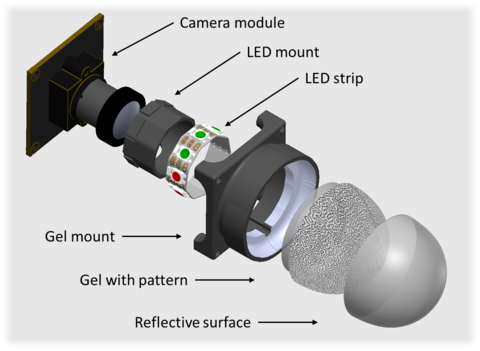
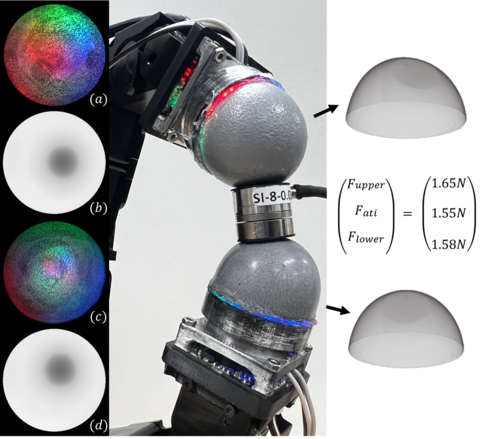
To address this challenge, we developed the optical tactile sensor DenseTact (licensable) which is composed of a soft, deformable silicone fingertip and internal LEDs and camera that observe the deformation of the silicone fingertip surface in an image and map the observed strain image to the 3D surface reconstruction and forces applied to the surface of the sensor.
This modular approach of mapping an image to the shape and forces on the surface of the sensor accelerates dexterous applications that can take these outputs (raw image, shape reconstruction, forces) and perform down-stream advanced manipulation tasks.
Papers and Videos:
These projects push the boundaries of robot manipulation and teleoperation, aiming to improve the versatility and effectiveness of robots in real-world applications.