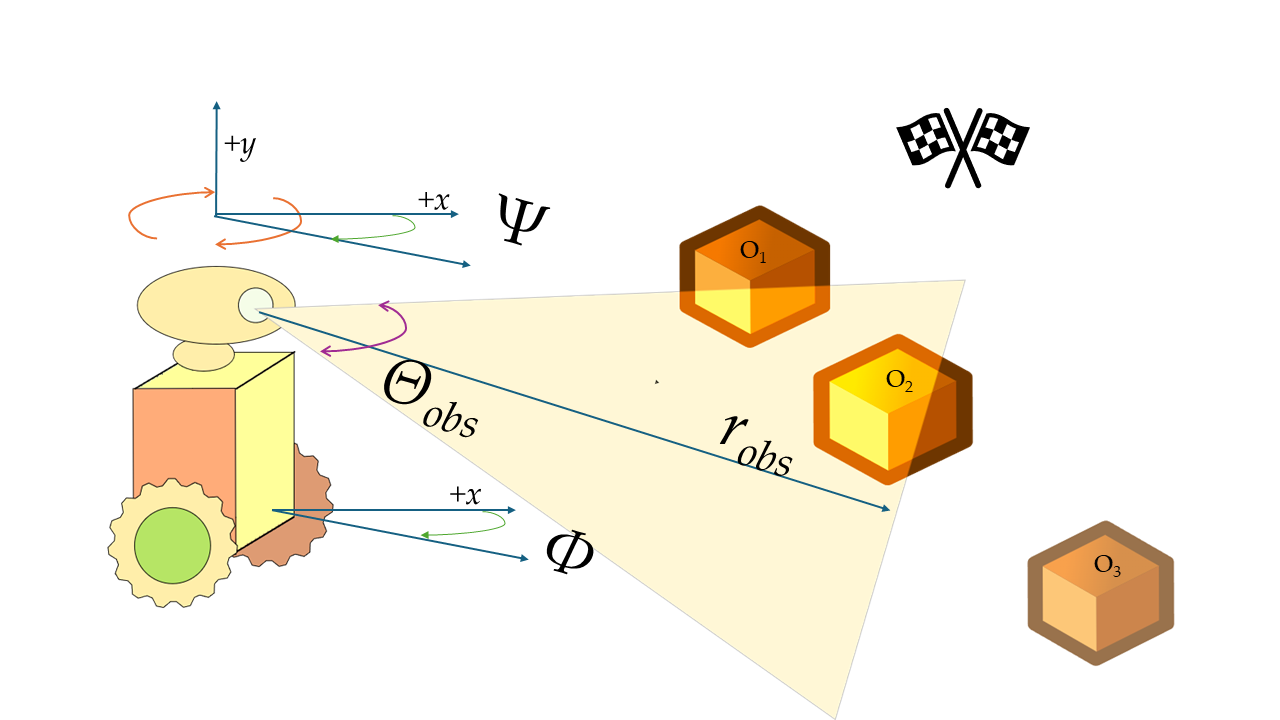
a robotic agent whose motion policy and observation ability are decoupled. The robot may move its base (orientation Φ) and independently move its camera (Ψ). The observation of the camera has a limited range robs and field of view Θobs and the likelihood of observing an object (Oi) within the field of view. The goal is to navigate to the goal without collision, and this work postulates that the correct modeling of both the policy and observation model is necessary to predict the motion behavior of the agent accurately.
Abstract
When working around humans, it is important to model their perception limitations in order to predict their behavior more accurately. In this work, we consider agents with a limited field of view, viewing range, and ability to miss objects within viewing range (e.g., transparency). By consid ering the observation model independently from the motion policy, we can better predict the agent’s behavior by considering these limitations and approximating them. We perform a user study where human operators navigate a cluttered scene while scanning the region for obstacles with a limited field of view and range. Using imitation learning, we show that a robot can adopt a human’s strategy for observing an environment with limitations on observation and navigate with minimal collision with dynamic and static obstacles. We also show that this learned model helps it successfully navigate a physical hardware vehicle in real time.
Video
Game-based environment for human data collection
This game was developed to study how humans interact with obstacles in a dynamic environment, where they have limited visibility. The goal is to understand human navigation strategies and imitate them in autonomous robots. This video demonstrates the key concepts and features, showing how users interact with the game’s challenges in real time.
As shown in the demo, the player must navigate through a cluttered environment while scanning for hidden obstacles using limited field of view. The game represents real-world scenarios in autonomous driving and robotics, where machines must navigate unknown environments under sensory limitations.
By playing this game, researchers gather valuable data on human behavior that can be applied to improve robotic motion planning algorithms.
Physical car experiment
We employ the diffusion policy learned from human data on a car. The car successfully navigates the environment with obstacles. Like humans, the car changes its observation direction to look around, detect obstacles, and avoid them while moving toward the goal in real-time
BibTeX
@misc{ZhenBhatt2024,
title={Understanding and Imitating Human-Robot Motion with Restricted Visual Fields},
author={Maulik Bhatt and HongHao Zhen and Monroe Kennedy III and Negar Mehr},
year={2024},
eprint={2410.05547},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={
https://doi.org/10.48550/arXiv.2410.05547},
}